مکاترونیک نیوز | کمپانی Melexis به روباتها حس لامسه میدهد

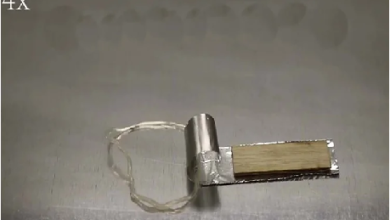
به گزارش مکاترونیک نیوز، کمپانی Melexis یک نوآوری بزرگ برای بهبود توانایی روباتها در تعامل با اشیاء شکننده مختلف انجام داده است. این شرکت از Tactaxis، یک سنسور لامسه کاملا یکپارچه که فشرده و نرم میباشد و بردار نیروی سه بعدی را بر روی سطح خود ارائه میدهد رونمایی کرده است.
این تکنولوژی، کار دست و گیره رباتها را بهبود میبخشد و عملیات ظریفی مانند میوهچنی را میسر میسازد. نمونه اولیه این فناوری با موفقیت در یک عملکرد جدید، پیادهسازی شده است. این نمونه اولیه دارای چندین پیکسل مغناطیس سنج سه بعدی با استفاده از فناوری Triaxis اثبات شده در صنعت میباشد.
این سنسور با یک آهنربا همراه است که در یک ماده الاستومری تعبیه شده است. این روش، یک رابط تماس نرم ارائه میدهد، که ویژگیهای پوست انسان را شبیهسازی میکند.
چنین چیدمانی حساسیت بالایی را ارائه میدهد. به طوری که تشخیص یکنواختی را فراهم میکند و در این حالت، مقدار کمی نیرو باعث ایجاد پاسخ میتواند بشود. وضوح نیروی به دست آمده mN 2.7 است که برای تشخیص تغییر وزن کسری از گرم (~ 0.3 گرم) کافی است.
نمونه اولیه Tactaxis بسیار فشرده است (با ابعاد فقط 5 میلی متر در 5 میلی متر در 5 میلی متر) و بنابراین برای فضاهای تنگ مناسب است.

رویکرد گرادیومتری، سنسور را در برابر میدانهای مغناطیسی مصون میکند.
این امر از خطاهای احتمالی اندازهگیری جلوگیری میکند. همچنین به اندازه کافی قوی است که بتواند با شرایط سخت مثل شرایط (تغییرات دما و غیره) کنار بیاید.
برخلاف حسگرهای لمسی رقیب مبتنی بر نور، Tactaxis کاملاً یکپارچه است و امکان تولید حجم بالایی از حسگرهای کالیبره در کارخانه وجود خواهد داشت. این فرآیند نیمه هادی، منجر به مزایای عمده هزینه و قابلیت اطمینان میشود.
ربات ها برای دستزدن به اشیای شکننده به حس لامسه نیاز دارند. برای چنین برنامههایی، ما یک حسگر مغناطیسی جدید برای اندازه گیری دقیق نیروی تماس ایجاد کردهایم که در برابر اختلالات، قوی هستند. کمپانی Melexis با بهرهبرداری از قابلیتهای فناوری حسگر مغناطیسی Triaxis گام مهمی در زمینه حسگرهای لمسی ربات برداشته است و یک حسگر چند محوری و رقابتی را ارائه میدهد. ما اکنون از نمونه اولیه Tactaxis به عنوان پایه برای کار و توسعه بیشتراستفاده خواهیم کرد.
گائل کلوز، مدیر نوآوری جهانی
مقالهای از جزئیات مربوط به نمونه اولیه حسگر نیروی مغناطیسی سه بعدی Melexis ارائه شده است که در IEEE موسسه مهندسین برق و الکترونیک منتشر شده است:
(T. Le Signor, N. Dupré, and G. Close, “A gradiometric magnetic force sensor immune to stray magnetic fields for robotic hands and grippers”, IEEE Robotics and Automation Letters, Jan. 2022. https://dx.doi.org/10.1109/LRA.2022.3146507)
نام گزارشگر : منا بنهری
نام منبع : https://www.azorobotics.com و https://www.melexis.com