کنترل ترافیک با استفاده از روشهای نوین هوش مصنوعی در سال 2023 پیشرفتهتر بوده است!!!
کنترل ترافیک و آگاهی از مسیرها برای رانندگی خودکار ایمن، پیشبینی دقیق حرکت وسایل نقلیه نزدیک یا مسیر آینده عابران پیاده ضروری است.
به گزارش مکاترونیک نیوز، اخیراً، یک گروه تحقیقاتی به سرپرستی دانشگاه شهر هنگ کنگ (CityU) یک سیستم هوش مصنوعی جدید توسعه داده است که دقت پیشبینی را در میان ترافیک متراکم به شدت افزایش میدهد و راندمان محاسباتی را جهت کنترل ترافیک تا بیش از 85 درصدبالا میبرد و در نتیجه پتانسیل بالایی برای بهبود ایمنی وسایل نقلیه خودران ارائه میدهد.
وانگ جیان پینگ، پروفسور دپارتمان علوم کامپیوتر (CS) در CityU، که سرپرستی این مطالعه را بر عهده داشت، اهمیت حیاتی پیشبینی دقیق و بیدرنگ در رانندگی خودکار را در عملکرد رانندگان و کنترل ترافیک تشریح کرد و تاکید کرد که حتی کمترین تاخیر و خطا میتواند منجر به تصادفات فاجعهبار شود. .
به طور کلی، این روش های کنترل ترافیک که شامل عادیسازی و رمزگذاری مجدد آخرین دادههای موقعیتی اشیاء و محیط اطراف، هر زمان که وسیله نقلیه و پنجره مشاهده آن جلو میرود، میشود، اگرچه آخرین دادههای موقعیت به طور قابلتوجهی با دادههای قبلی همپوشانی دارند، منجر به تاخیر و محاسبات اضافی در پیشبینیهای آنلاین بلادرنگ میشود.
برای از بین بردن این محدودیتها، پروفسور وانگ و تیمش یک مدل پیشبینی مسیر کشف، معروف به “QCNet” ارائه کردند که از نظر تئوری میتواند به پردازش جریان و کنترل ترافیک کمک کند.

این به اصل فضا-زمان مقایسه ای برای موقعیت یابی بستگی دارد، که مدل پیش بینی را با ویژگی های برجسته ای مانند “عدم تغییر روتو-ترجمه در بعد فضا” و “عدم تغییر ترجمه در بعد زمان” ارائه میدهد.
این دو ویژگی به اطلاعات موقعیتی که از یک سناریوی رانندگی استخراج شده است، بدون توجه به سیستم مختصات فضا-زمان بیننده در هنگام مشاهده سناریوی رانندگی، اجازه میدهد تا خاص و ثابت باشد.
این روش ذخیره و استفاده مجدد از رمزگذاریهای محاسبهشده قبلی مختصات را قادر میسازد، در نتیجه به مدل پیشبینی اجازه میدهد تا از نظر نظری در زمان واقعی کار کند.
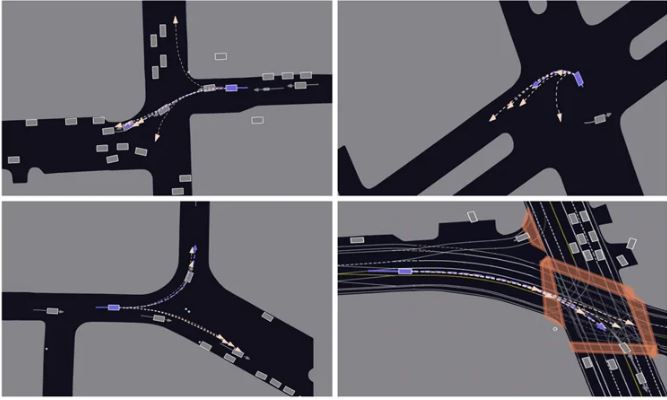
همچنین، این تیم موقعیت های مقایسه ای خطوط، کاربران جاده و گذرگاه ها را در مدل هوش مصنوعی ادغام کرد تا تعاملات و روابط آنها را در سناریوهای رانندگی به تصویر بکشد.این درک بهتر از قوانین جاده و تعاملات بین چندین کاربر جاده به مدل اجازه میدهد تا پیشبینیهای بدون برخورد را در حالی که عدم اطمینان در رفتار آتی کاربران جاده را در نظر میگیرد، تولید کند.برای ارزیابی کارایی QCNet، گروه تحقیقاتی از «Argoverse 1» و «Argoverse 2»، دو مجموعه بزرگ مقیاس دادههای رانندگی خودکار منبع باز و نقشههای با کیفیت بالا از شهرهای مختلف ایالات متحده استفاده کردند.
این مجموعه دادهها به عنوان سختترین معیارها برای پیشبینی رفتار شناخته میشوند و بیش از 320000 دنباله داده و 250000 سناریو را در بر میگیرند.در آزمایش، QCNet هم سرعت و هم دقت را در پیشبینی حرکات آتی کاربران جاده نشان داد. این می تواند با یک پیش بینی طولانی مدت تا شش ثانیه اتفاق بیفتد.
در بین 333 روش پیشبینی در Argoverse 1 و 44 روش در Argoverse 2 رتبه اول را کسب کرد.علاوه بر این، QCNet به طور قابل توجهی تأخیر استنتاج آنلاین را از 8 میلی ثانیه به 1 میلی ثانیه کاهش داد و بازده را بیش از 85 درصد در متراکم ترین صحنه ترافیک، از جمله 190 کاربر جاده و 169 چند ضلعی نقشه، مانند گذرگاه ها و خطوط افزایش داد.
وانگ جیان پینگ، استاد گروه علوم کامپیوتر، دانشگاه شهر هنگ کنگ:
با ادغام این فناوری در سیستم های رانندگی خودران، وسایل نقلیه خودران می توانند به طور موثر محیط اطراف خود را درک کنند، رفتار آینده سایر کاربران را با دقت بیشتری پیش بینی کنند، و تصمیمات ایمن تر و شبیه به انسان اتخاذ کنند و راه را برای رانندگی ایمن خودران هموار کنند. ما قصد داریم این فناوری را برای کاربردهای بیشتری در رانندگی خودران، از جمله شبیهسازی ترافیک و تصمیمگیری شبیه به انسان، به کار ببریم.
نویسنده اول این مطالعه آقای ژو زیکانگ، دانشجوی دکترا در گروه تحقیقاتی پروفسور وانگ در بخش CS در CityU است. نویسنده مسئول این مطالعه پروفسور وانگ است.
همچنین همکارانی از مؤسسه تحقیقاتی Hon Hai، یک مرکز تحقیقاتی که توسط گروه فناوری Hon Hai (Foxconn®) تأسیس شده است، و دانشگاه Carnegie Mellon در ایالات متحده در این مطالعه مشارکت داشتند. نتایج مطالعه با سیستم رانندگی خودکار گروه فناوری Hon Hai ترکیب میشود تا ایمنی رانندگی خودران و کارایی پیشبینی در زمان واقعی را بهبود بخشد.
این مطالعه توسط چندین منبع مالی از جمله موسسه تحقیقاتی هون های، شورای کمک هزینه های تحقیقاتی هنگ کنگ و کمیسیون نوآوری علم و فناوری شنژن حمایت مالی شد.
نام خبرنگار: سمیه آموت سر
منبع خبر: https://www.cityu.edu.hk