به گزارش مکاترونیک نیوز، اکنون رباتها میتوانند مستقیماً از ویدئوهای تعامل انسان و ربات یاد بگیرند و به لطف روش یادگیری جدید ایجاد شده توسط محققان SCS، این اطلاعات را در کارهای جدید به کار ببرند.
محققان SCS یک روش یادگیری برای رباتها ایجاد کردهاند که به آنها امکان میدهد مستقیماً از ویدیوهای تعامل انسانی یاد بگیرند و آن دانش را در کارهای جدید به کار ببرند.
برای مشاهده ربات، شکر بهل در یخچال را باز کرد. قبل از تجزیه و تحلیل اطلاعات و آماده شدن برای تقلید از آنچه بهل انجام داده بود، حرکات او، نحوه باز شدن در، مکان یخچال و سایر جزییات را مشاهده کرد.
در ابتدا ربات شکست خورد، گاهی کنترل خود را از دست می دهد، دسته را از جایی نامناسبی می گیرد یا آن را در جهت اشتباه می کشد. اما پس از مدتی تمرین، ربات موفق شد، در را باز کند.
شکر بهل، دکتری دانشجو، موسسه رباتیک، دانشکده علوم کامپیوتر، دانشگاه کارنگی ملون میگوید:
«تقلید یک راه عالی برای یادگیری است. در واقع داشتن ربات ها از تماشای مستقیم انسان ها یک مشکل حل نشده در این زمینه باقی مانده است، اما این کار گام مهمی در ایجاد این توانایی برداشته است.»
بررسی روشهای یادگیری جدید برای رباتها
بر اساس تحقیقات انجام شده این ربات، این پتانسیل را دارد که مستقیماً از ویدیوهای تعامل انسانی بیاموزد و آن اطلاعات را به کارهای جدید تعمیم دهد و رباتهایی را بسازد که برای یادگیری کارهای خانه مناسب هستند. مردم به طور مداوم تمایل دارند چند کار را در خانه خود انجام دهند. با WHIRL ، یک ربات میتواند آن وظایف را یادداشت کند و دادههای ویدئویی مورد نیاز خود را جمعآوری کند تا نحوه انجام خود کار را شناسایی کند.
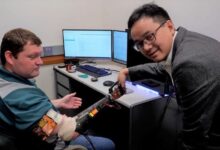
این گروه تحقیقاتی یک دوربین و نرم افزار خود را به یک ربات آماده اضافه کردند و یاد گرفتند که چگونه بیش از 20 کار را انجام دهد. از باز و بسته کردن وسایل، درهای کابینت و کشوها گرفته تا قرار دادن درب روی قابلمه، هل دادن روی صندلی و حتی بیرون آوردن کیسه زباله از سطل.
هر بار، ربات یک انسان را تماشا میکرد که کار را یکبار به پایان میرساند و بیشتر تمرین میکرد و یاد میگرفت تا کار را به تنهایی انجام دهد.
دیپاک پاتاک، استادیار موسسه رباتیک، دانشگاه کارنگی ملون میگوید:
«این کار راهی برای آوردن رباتها به خانه ارائه میدهد. به جای اینکه منتظر بمانیم تا رباتها برنامهریزی یا آموزش ببینند تا وظایف مختلف را با موفقیت انجام دهند قبل از استقرار آنها در خانهها، این فناوری به ما اجازه میدهد تا رباتها را مستقر کنیم و آنها یاد بگیرند که چگونه وظایف خود را انجام دهند، در حالی که با محیط خود سازگار میشوند و صرفاً بهبود مییابند.»
روشهای فعلی موجود برای آموزش یک کار به ربات به یادگیری تقلید یا تقویتی بستگی دارد. در یادگیری تقلیدی، انسان ها به صورت دستی با یک ربات کار می کنند تا به او آموزش دهند که چگونه میتواند یک کار را انجام دهد.
این فرایند باید چند بار برای یک کار واحد قبل از یادگیری ربات انجام شود. در یادگیری تقویتی، ربات معمولاً بر روی میلیونها مثال در شبیهسازی آموزش داده شد و از او خواسته میشود تا آن آموزش را با دنیای واقعی تنظیم کند.
آموزش رباتها با روشهای یادگیری جدید
هر دو مدل یادگیری در حین آموزش یک کار واحد در محیطی ساختار یافته به ربات به خوبی کار میکنند، اما مقیاسگذاری و استقرار آنها سخت است.
WHIRL، این پتانسیل را دارد که از هر ویدیویی از یک انسان در حال اجرای یک کار یاد بگیرد. همچنین میتواند به راحتی مقیاس پذیر باشد، به یک کار خاص محدود نشود و می تواند در محیط خانه واقع گرایانه عمل کند.
این گروه حتی در حال کار بر روی نسخهای از WHIRL است که با دیدن ویدیوهای تعامل انسانی در یوتیوب و فلیکر آموزش دیده است.
پیشرفت در بینایی کامپیوتر کار را ممکن کرد. با استفاده از مدلهای آموزشدیده بر روی دادههای اینترنتی، رایانهها در حال حاضر میتوانند حرکت را به صورت سه بعدی درک کرده و مدل کنند. این تیم از این مدل ها برای درک حرکت انسان استفاده کردند و آموزش WHIRL را ساده کردند.
با کمک WHIRL، یک ربات پتانسیل انجام وظایف را در محیط طبیعی خود دارد. لوازم خانگی، درها، دربها، کشوها، صندلیها و کیسههای زباله برای ربات تغییر نکرده یا دستکاری نشدهاند.
چند تلاش اولیه که ربات برای انجام یک کار انجام داد با شکست مواجه شد. با این حال، هنگامی که چند موفقیت به دست آورد، به سرعت به نحوه انجام کار پایبند شد و در نهایت بر آن مسلط شد. ممکن است ربات نتواند کار را به همان روشی که یک انسان انجام می دهد، انجام دهد، اما هدف این نیست.
انسانها و رباتها از بخشهای مختلفی تشکیل شدهاند و تمایل دارند به شیوهای متفاوت حرکت کنند. تنها چیزی که مهم است، این است که نتیجه نهایی یکسان باشد. برای مثال در را باز کند، سوئیچ توسط آنها خاموش شده و شیر با کمک آنها آب باز شود.
دیپاک پاتاک، استادیار موسسه رباتیک، دانشگاه کارنگی ملون میگوید:
«برای مقیاسبندی رباتیک در طبیعت، دادهها باید قابل اعتماد و پایدار باشند و رباتها باید با تمرین به تنهایی در محیط خود بهتر شوند.»
خبرنگار: مریم آموت سر
منبع خبر: www.azorobotics.com