مکاترونیک نیوز | ساخت و ساز در فضا میتوانند با کمک رباتهای پیادهرونده مخصوص ساخت و ساز و خدمات فضایی متحول شود!
رباتهای پیادهرونده مخصوص ساخت و ساز فضایی و کمک آنها به ساخت و ساز در فضا برای متحول کردن دنیا وارد عرصه فعالیت میشوند.

به گزارش مکاترونیک نیوز، دانشمندان یک ربات با قابلیت پیادهروندگی و ساخت و ساز در فضا را مهندسی کردهاند که میتواند سرمایه گذاریهای عظیم ساخت و ساز در فضا را متحول کند.
آنها قابلیتهای ربات مخصوص ساخت و ساز در فضا را برای راهاندازی یک تلسکوپ فضایی با دیافراگم بزرگ 25 متری به نام تلسکوپ LAST، در فضا آزمایش کرده و نتایج خود را در ژورنال Frontiers in Robotics and AI گزارش داده و به ثبت رساندند.
یک مدل کوچک شده از این ربات جهت معرفی و جذب پتانسیلهای سرمایهگذاری کلان ساخت و ساز در زمین به نمایش گذاشته شده است تا قابلیت ربات های ساخت و ساز در فضا را به نمایش بگذارد. سرویس ساخت و ساز و نگهداری، بیش از هر جای دیگری برای فضا ضروری است، جایی که محیط در آن به وفور موجود است و در مقابل فناوری انسانی که چرخه حیات محدودی دارد مزیت ویژهای محسوب میشود
فن آوریهای مربوط به رباتیک و سیستمهای خودمختار، منجر به سرمایه گذاریهای کلان در زمینه تعمیرات و نگهداری و انجام انواع فعالیتهای خدماتی شدهاند و به جامعه فضایی برای انجام تحقیقات انقلابی در سفرهای فضایی متعدد کمک کردهاند و اکنون در جهت انجام ساخت و ساز در فضا مورد توجه قرار گرفته اند.
پیشرفتهای بسیار در رباتیک و پلتفرمهای خودمختار، مجموعهای از خدمات در فضا را ممکن میسازد، که شامل مونتاژ، ساخت، نگهداری، رصد زمین، نجوم و حذف زبالهها میباشد و محدود به آن نمیشود. با وجود خطرات بیشمار، وابستگی تنها به سازندگان انسانی کافی نیست و فناوریهای موجود در حال منسوخ شدن هستند. برای حمایت از اکوسیستم مداری فعلی و رو به رشد، باید فناوری پایدار و آیندهنگر را معرفی کنیم.
با افزایش ماموریت های فضایی، نیاز به زیرساختهای گستردهتری در مدار وجود دارد. مأموریتهای مونتاژی و ساخت و سازی در فضا یکی از مسئولیتهای کلیدی در پاسخگویی به تقاضای فزاینده است.
مانو نیر، نویسنده مسئول و کاندیدای دکترا، دانشگاه لینکلن نایر و همکارانش در مقاله خود یک پلت فرم رباتیک پیاده رونده ماهر و پیشرفته را به تصویر کشیدند که میتواند برای سرمایه گذاریهای فضایی و فعالیت های مونتاژ در مدار استفاده شود.
به عنوان یک مورد در این زمینه میتوان به رباتی که برای مونتاژ تلسکوپ 25 متری LAST به کار گرفته شد نام برد. مونتاژ تلسکوپ در مدار از زمان معرفی تلسکوپ فضایی هابل و جانشین آن، تلسکوپ فضایی جیمز وب معرفی شد و پس از آن، جامعه فضایی بی وقفه به سمت نصب تلسکوپ های جدیدتر و بزرگتر با دیافراگم های بزرگتر (قطر ناحیه جمع آوری نور) حرکت کرده است.
کنار هم قرار دادن اجزا چنین تلسکوپ هایی، مانند تلسکوپ 25 متری LAST، بر روی زمین، به دلیل اندازه ناکافی آنها، با وسایل نقلیه پرتاب موجود در حال حاضر امکان پذیر نیست. به همین دلیل است که تلسکوپ های بزرگتر ترجیحاً در فضا (یا مدار) کنار هم قرار میگیرند.
مانونیر گفت: “چشم انداز وسیع راه اندازی مدار تلسکوپ LAST ، به علایق علمی و تجاری در نجوم اعماق فضا و رصد زمین دامن زده است.”
ابزارهای مناسب، دقیق و قابل قبول برای کنار هم قرار دادن اجزاء تلسکوپی با آن اندازه در فضا الزامی است. اگرچه نامزدهای رباتیکی که تا کنون ارائه شدهاند، بارای راه رفتن در فضا ماهر و قابل هستند، اما از نظر مانور حرکتی، محدود هستند.
بنابراین، برای طراحیهای آتی رباتهای پیادهرونده در مدار، با ویژگیهای تحرک بالا، جهت دسترسی به فضای کاری بسیار بزرگتر بدون خطر باید ساخته شوند.
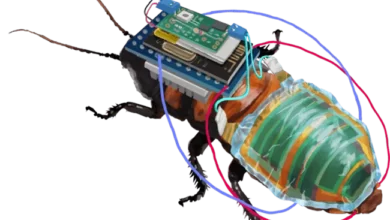
مانو نیر، نویسنده مسئول و کاندیدای دکترا، دانشگاه لینکلن ربات E-Walker می گوید، دانشمندان یک ربات راه رونده کاملا ماهر با هفت درجه آزادی را پیشنهاد کردند (یک سکوی رباتیک دست و پا دار، که می تواند در امتداد یک سطح به سمت مکانهای مختلف حرکت کند تا عملیاتی با هفت درجه آزادی را انجام دهد) یا به عبارت ساده، آنها از یک E-Walker ، برای انجام ماموریت مهندسی طراحی دقیق با پتانسیل حرکت بالا و همچنین برای قرار دادن تلسکوپ 25 متری LAST در مدار فظایی استفاده کردند.
این ربات به ربات فضایی Canadarm2 فعلی و ربات European Robotic Arm در ایستگاه فضایی بین المللی تشبیه شده است. تجزیه و تحلیل ما نشان می دهد که طرح نوآورانه E-Walker پیشنهادی ویژه و همه کاره و یک نامزد ایده آل برای ماموریت های آینده در مدار است.
E-Walker میتواند چرخه حیات یک ماموریت را با انجام تعمیرات و سرویسهای معمول ماموریتهای پس از مونتاژ در فضا افزایش دهد.
مانو نیر، نویسنده مسئول و کاندیدای دکترا، دانشگاه لینکلن نایر افزود: «تجزیه و تحلیل نمونه اولیه کوچکشده نشان میدهد که این ربات فضایی به عنوان یک کاندید ایدهآل برای عملیات سرویسدهی، نگهداری و مونتاژ روی زمین، مانند انجام بررسیهای تعمیر و نگهداری منظم روی توربینهای بادی، معرفی شود »
با این حال، چیزهای بیشتری برای بررسی وجود دارد. این مطالعه به بررسی مهندسی طراحی یک مدل با اندازه کامل و نمونه اولیه از E-Walker محدود شده است. کار نمونه سازی E-Walker اکنون در دانشگاه لینکلن در حال انجام است. بنابراین، تایید آزمایشی و اعتبار سنجی به طور جداگانه منتشر خواهد شد.
نام خبرنگار: سمیه آموت سر
منبع خبر: www.azorobotics.com