مکاترونیک نیوز | محققان هشدار میدهند که اجسام در حسگرهای خودروی خودران ممکن است نزدیکتر از چیزی باشند که به نظر میرسند
به گزارش مکاترونیک نیوز، محققان دانشگاه دوک برای بار اول در استراتژی خاصی نشان دادهاند که میتوان حسگرهای خودروی خودمختار استاندارد صنعتی را فریب داد تا تصور کنند اشیاء نزدیکتر (یا دورتر) از آنچه به نظر میرسند، هستند.
این تحقیق نشان میدهد که افزودن قابلیتهای سهبعدی نوری یا امکان اشتراکگذاری دادهها با خودروهای مجاور ممکن است برای محافظت کامل از خودروهای خودران در برابر حملات ضروری باشد.
نتایج در 10 تا 12 آگوست در سمپوزیوم امنیت USENIX 2022 ، که میتوان گفت یک مکان برتر در این زمینه است، ارائه خواهد شد.
یکی از بزرگترین چالشهایی که محققان در حال توسعه سیستمهای رانندگی خودران باید نگران آن باشند، محافظت در برابر حملات است. یک استراتژی مشترک برای ایمن سازی، این است که داده ها را بوسیله ابزارهای جداگانه در مقابل یکدیگر، بررسی کرد تا مطمئن شد اندازه گیری های آنها با هم معنا دار و صحیح است.
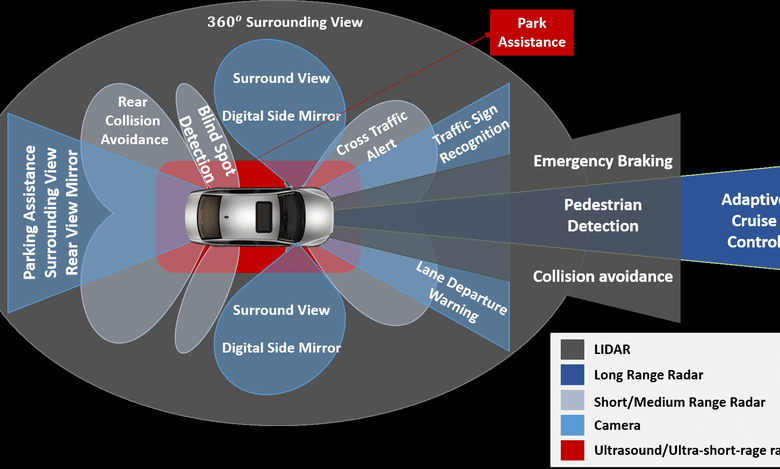
متداول ترین فناوری مکان یابی که توسط شرکت های خودروسازی خودران امروزی استفاده می شود، داده های دوبعدی دوربین ها و داده های سه بعدی LiDAR را که اساساً رادار مبتنی بر لیزر است، ترکیب می کند. این ترکیب در برابر طیف وسیعی از حملات که سعی در فریب دادن سیستم بصری برای دیدن نادرست جهان را دارند و با این استراتژی عمل میکنند، بسیار قوی است.
هدف ما درک محدودیت های سیستم های موجود است تا بتوانیم سیستم را در برابر حملات قوی محافظت کنیم.
میروسلاو پاژیک، دانشیار مهندسی برق و کامپیوتر خانواده دیکینسون در دوک
این تحقیق نشان میدهد که چگونه افزودن چند نقطه داده در ابر نقطه سهبعدی در قسمت جلو یا پشت مکانی که واقعاً یک شی میتواند وجود داشته باشد، میتواند موجب بروز مشکلاتی در تصمیمگیری این سیستمها شود.
استراتژی حمله جدید با شلیک یک تفنگ لیزری به حسگر LIDAR ماشین، کار میکند، تا نقاط داده نادرست را به مرکز داده آن اضافه کند. اگر این نقاط داده به شدت با آنچه دوربین خودرو میبیند ناسازگار باشد، تحقیقات قبلی نشان داده است که سیستم میتواند حمله را تشخیص دهد.
اما تحقیقات جدید Pajic و همکارانش نشان میدهد که نقاط داده سه بعدی LIDAR که به دقت در محدوده خاصی از میدان دید دو بعدی دوربین قرار داده شدهاند، می توانند سیستم را فریب دهند.
این ناحیه آسیبپذیر در مقابل لنز دوربین به شکل یک فروستوم (یک هرم سه بعدی که نوک آن بریده شده است)، کشیده شده است.
در مورد دوربین رو به جلو که بر روی خودرو نصب شده است، این بدان معناست که چند نقطه داده در جلو یا پشت خودروی نزدیک یکدیگر قرار میگیرد که میتواند درک سیستم از آن را چندین متر تغییر دهد.
این به اصطلاح حمله ناکام می تواند کنترل کروز تطبیقی را فریب دهد و فکر کند خودرو در حال کاهش یا افزایش سرعت است.
میروسلاو پاژیک، دانشیار مهندسی برق و کامپیوتر خانواده دیکینسون در دوک
تا زمانی که سیستم متوجه شود که مشکلی وجود دارد، هیچ راهی برای جلوگیری از برخورد با خودرو بدون مانورهای تهاجمی وجود نخواهد داشت که میتواند مشکلات بیشتری ایجاد کند.
به گفته Pajic، احتمال زیادی وجود ندارد که کسی وقت بگذارد و لیزر را روی یک ماشین یا شی کنار جاده برای فریب دادن وسایل نقلیه شخصی که در بزرگراه عبور می کنند، بگذارد.
با این حال، در شرایط نظامی که وسایل نقلیه منفرد می توانند اهداف بسیار با ارزشی باشند، این خطر به شدت افزایش می یابد. و اگر هکرها بتوانند به جای نیاز به لیزرهای فیزیکی راهی برای ایجاد این نقاط داده نادرست به صورت مجازی بیابند، بسیاری از وسایل نقلیه ممکن است در آن واحد مورد حمله قرار گیرند.
پاژیک میگوید برای محافظت در برابر این حملات، افزونگی داده ها اضافه شده است. به عنوان مثال، اگر خودروها دارای «دوربینهای استریو» با میدانهای دید همپوشانی بودند، بهتر میتوانستند فاصلهها را تخمین بزنند و دادههای LIDAR را که با ادراکشان مطابقت ندارد، ببینند.
نام منبع خبر: https://www.azorobotics.com
نام گزارشگر : سمیه آموت سر