مکاترونیک نیوز | مهندسان یک دستگیره رباتیکی با قابلیتهای حسی بسیار بالا ساختند
به گزارش مکاترونیک نیوز، خلاص شدن از تصویر یک ربات فلزی عظیم که به صورت یکنواخت ارتباط برقرار می کند و با گام های سخت به حرکت ادامه میدهد، دشوار است. از سوی دیگر، متخصصان رباتیک نرم، دیدی کاملاً متفاوت در ذهن دارند: آنها دستگاههای مستقلی که از قطعات انعطافپذیری تشکیل شدهاند که در لمس ملایم هستند و بیشتر از R2-D2 یا Robby the Robot به انگشتان انسان شبیه هستند را برای ساخت رباتها مناسب میدانند.
پروفسور ادوارد ادلسون و گروه علم ادراکی او در آزمایشگاه علوم کامپیوتر و هوش مصنوعی MIT (CSAIL) اکنون این مدل را ارائه میکنند.
آدلسون و ساندرا لیو، دکترای مهندسی مکانیک. دانشجوی CSAIL، اخیرا یک گیره رباتیک ساخته است که از انگشتان جدید “GelSight Fin Ray” استفاده می کند که به اندازه کافی انعطاف پذیر هستند تا اشیا را مانند دست انسان دستکاری کنند. گیره لیو و ادلسون مجهز به حسگرهای لمسی است که می تواند با حساسیت پوست انسان مطابقت داشته باشد یا از آن فراتر رود، که آن را از سایر تلاش ها در این زمینه متمایز می کند. این مشاهدات هفته گذشته در پنجمین کنفرانس بین المللی رباتیک نرم IEEE 2022 ارائه شد
به لطف کشفی که توسط زیست شناس آلمانی Leif Kniese در سال 1997 انجام شد، پرتو باله به یک مورد محبوب در رباتیک نرم تبدیل شده است. او متوجه شد که وقتی انگشت خود را به دم ماهی فشار میدهد، اشعه به سمت او خم میشود و تقریباً انگشت او را در آغوش میگیرد، به جای اینکه به سمت دیگر کج شود. اگرچه این طراحی محبوب است، اما فاقد حساسیت لمسی است.
این کشف بسیار مفید، است زیرا میتواند به طور غیر فعال با اشکال مختلف سازگار شود و در نتیجه اشیاء مختلف را بگیرد. اما به منظور فراتر از آنچه که دیگران در این زمینه قبلا انجام داده بودند، ما تصمیم گرفتیم که یک حسگر لمسی غنی را در دستگیره خود بگنجانیم.
ساندرا لیو، آزمایشگاه علوم کامپیوتر و هوش مصنوعی، موسسه فناوری ماساچوست
گیره از دو انگشت پرتو باله منعطف تشکیل شده است که به شکل هر چیزی که لمس می کنند اندازه می گیرد. انگشتان دست از مواد پلاستیکی قابل انعطافی ساخته شدهاند که روی چاپگر سه بعدی چاپ شدهاند که در این زمینه نسبتاً رایج است.
از سوی دیگر، انگشتان گیره رباتیک نرم معمولی دارای پایه های متقاطع پشتیبانی کننده هستند که در طول فضای داخلی خود قرار دارند، در حالی که لیو و ادلسون فضای داخلی را خالی کرده اند تا جایی برای دوربین و سایر اجزای حسی خود باز کنند.
در یک انتهای حفره توخالی، دوربین روی یک پشتوانه نیمه صلب قرار گرفته است که توسط LED ها روشن می شود. دوربین در مقابل لایهای از پدهای حسی ساخته شده از ژل سیلیکون (به نام «GelSight») قرار دارد که روی یک لایه نازک از مواد اکریلیک بسته شدهاند. تکه انگشت پلاستیکی در سمت انتهایی حفره داخلی به ورق اکریلیک متصل شده است.
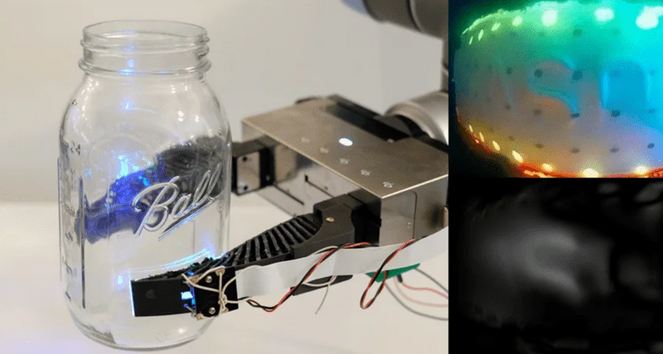
هنگامی که چیزی لمس میشود، انگشت به طور یکپارچه در اطراف آن جمع میشود و با خطوط آن ترکیب می شود. دوربین، همراه با الگوریتمهای محاسباتی، میتواند شکل کلی جسم، جهتگیری آن در فضا، زبری سطح و نیروی اعمال شده توسط (و وارد شده به) هر انگشت را با تعیین نحوه تغییر شکل صفحات سیلیکونی و اکریلیک در حین ارزیابی کند. این تعامل لیو و ادلسون در آزمایشی که در آن تنها یکی از دو انگشت “حسی” شده بود، گیره خود را از طریق سرعت آن به کار گرفتند. یک توت فرنگی پلاستیکی، یک مینی پیچ گوشتی، یک شیشه بال میسون، یک لوله رنگ اکریلیک و یک لیوان شراب همگی با موفقیت توسط دستگاه آنها کار می کردند.
حسگر داخلی قادر بود دانه های روی سطح توت فرنگی تقلبی را در حالی که گیره آن را نگه داشته بود شناسایی کند. انگشتان لوله رنگ را بدون فشار دادن آنقدر محکم گرفتند که ترکید و محتویات آن ریخت.
سنسور GelSight حتی قادر به خواندن حروف روی شیشه میسون بود و این کار را به شیوه ای مبتکرانه انجام داد. شکل کلی شیشه ابتدا با بررسی نحوه خم شدن ورق اکریلیک هنگام پیچیده شدن به دور آن مشخص شد. سپس این الگو با استفاده از یک الگوریتم کامپیوتری از تغییر شکل پد سیلیکونی کم شد و تنها تغییر شکل ظریف ناشی از حروف باقی ماند. به دلیل انکسار نور، اجسام شیشه ای چالشی برای روبات های مبتنی بر بینایی ایجاد می کنند. چنین ابهام نوری هیچ تأثیری بر حسگرهای لمسی ندارد. هنگامی که لیوان شراب را برمی داشت، گیره می توانست جهت ساقه را احساس کند و قبل از اینکه به آرامی آن را پایین بیاورد، مطمئن شد که مستقیماً به سمت بالا است. هنگامی که پایه با میز تماس پیدا کرد، پد ژل تماس را تشخیص داد. از هر ده کارآزمایی، هفت مورد از محل مناسبی برخوردار بودند و خوشبختانه در طول فیلمبرداری آزمایش هیچ شیشه ای شکسته نشد.
سنجش با روباتهای نرم چالش بزرگی بوده است، زیرا نصب حسگرها – که به طور سنتی سفت و سخت هستند – روی بدنههای نرم دشوار است. این مقاله یک راه حل ساده برای آن مشکل ارائه می دهد.
ونژن یوان، استادیار، موسسه رباتیک، دانشگاه کارنگی ملون
یوان بخشی از مطالعه نبود. نویسندگان از یک طراحی بسیار هوشمندانه استفاده کردند تا حسگر مبتنی بر بینایی خود را برای گیره سازگار کار کند، به این ترتیب زمانی که روبات ها اشیا را می گیرند یا با محیط خارجی تعامل می کنند، نتایج بسیار خوبی ایجاد می کنند. یوان افزود: این فناوری پتانسیل زیادی برای استفاده گسترده برای دستگیره های رباتیک در محیط های واقعی دارد.
GelSight Fin Ray کاربردهای بالقوه زیادی دارد، اما لیو و ادلسون ابتدا روی برخی بهبودها کار می کنند. آنها بیثباتی ساختاری، تمایل به پیچش را با توخالی کردن انگشت برای ایجاد فضایی برای سیستم حسی خود معرفی کردند، که معتقدند با طراحی بهتر میتوان آن را کاهش داد.
دانشمندان می خواهند حسگرهای GelSight را توسعه دهند که می تواند با روبات های نرم ساخته شده توسط سایر گروه های تحقیقاتی کار کند. آنها همچنین قصد دارند یک گیره سه انگشتی ایجاد کنند که می تواند برای کارهایی مانند چیدن میوه و تعیین میزان رسیده بودن آن مفید باشد.
در رویکرد آنها، حس لامسه به اجزای کم مانند دوربین، ژل و LED نسبت داده می شود. لیو امیدوار است که «ممکن است بتوان با استفاده از فناوری هایی مانند GelSight، حسگرهایی را ارائه کرد که هم کاربردی و هم مقرون به صرفه باشند». حداقل این یکی از اهدافی است که او و سایرین در آزمایشگاه برای رسیدن به آن تلاش می کنند.
این تحقیق توسط موسسه تحقیقاتی تویوتا و دفتر تحقیقات نیروی دریایی ایالات متحده تامین مالی شده است.
منبع خبر: https://www.azorobotics.com
نام خبرنگار: سمیه آموت سر